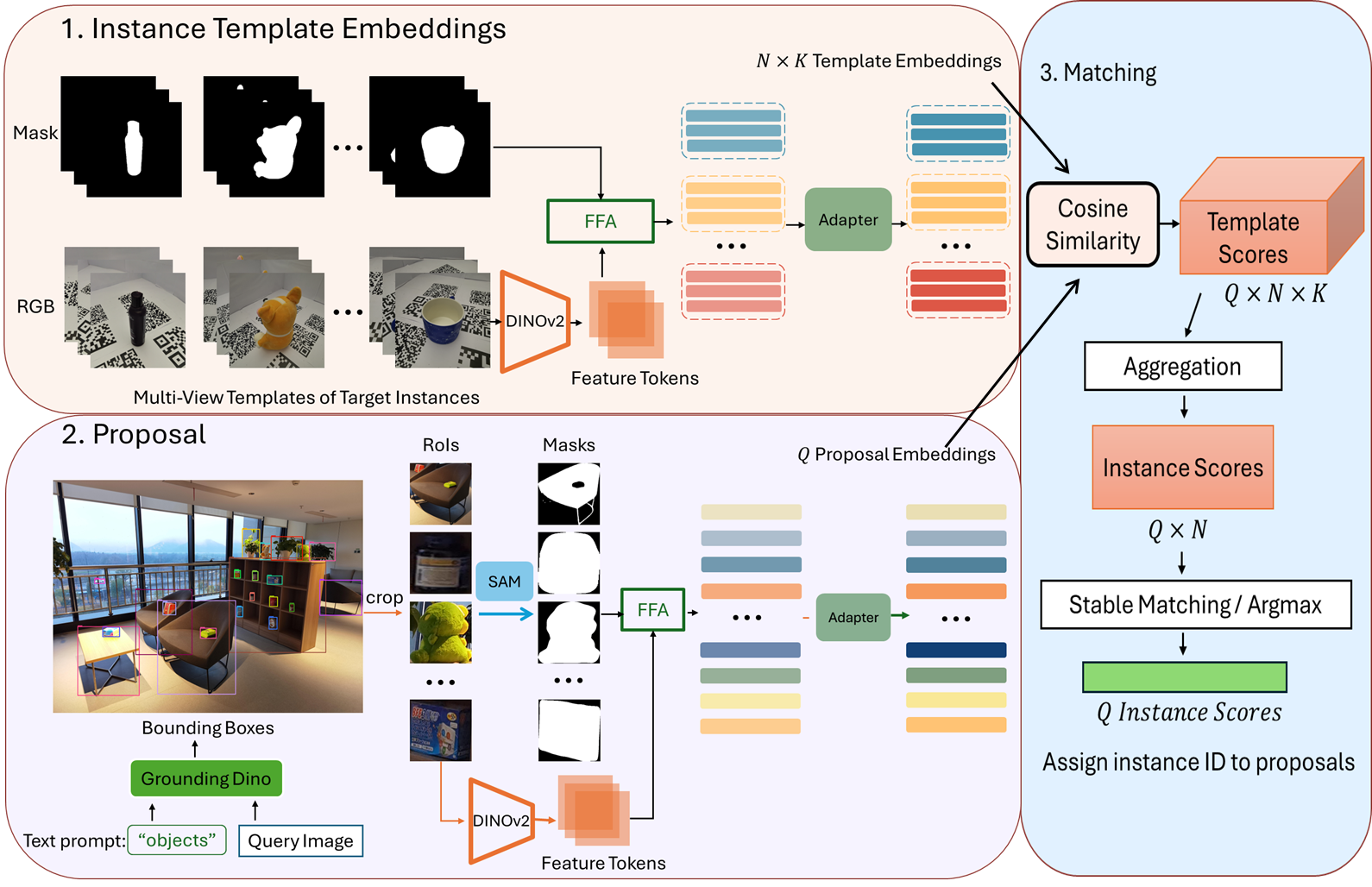
Adapting Pre-Trained Vision Models for Novel Instance Detection and Segmentation
Yangxiao Lu, Jishnu Jaykumar P, Yunhui Guo, Nicholas Ruozzi, Yu Xiang
In arXiv, 2024.
Ranked #1 in BOP Challenge.

His research interests focus on Robotics and computer vision. Now he is working with Dr. Nicholas Ruozzi
and Dr. Yu Xiang in PGM&ML lab and Intelligent Robotics and Vision Lab at University of Texas at Dallas (UT Dallas).
Before joining labs, He was an M.S in Statistics at UT Dallas from 2019 to 2020. He received his B.Eng. in Ocean oil and gas engineering from China University of Petroleum at Beijing (CUP).
Email: yangxiao.lu[at]utdallas[dot]edu
Welcome to my homepage!
As a fifth-year PhD candidate, I am actively seeking both internship opportunities and full-time positions. I am keen to leverage my skills and knowledge to contribute to a dynamic team. Please explore my profile and contact me if you have opportunities that match my goals.
Yangxiao Lu, Jishnu Jaykumar P, Yunhui Guo, Nicholas Ruozzi, Yu Xiang
In arXiv, 2024.
Ranked #1 in BOP Challenge.

Ninad Khargonkar, Sai Haneesh Allu, Yangxiao Lu, Jishnu Jaykumar P, Balakrishnan Prabhakaran, Yu Xiang
In International Conference on Robotics and Automation (ICRA), 2024.

Yangxiao Lu, Ninad Khargonkar, Zesheng Xu, Charles Averill, Kamalesh Palanisamy, Kaiyu Hang, Yunhui Guo, Nicholas Ruozzi, Yu Xiang
In Robotics: Science and Systems (RSS), 2023.

Yangxiao Lu, Yuqiao Chen, Nicholas Ruozzi, Yu Xiang
In International Conference on Robotics and Automation (ICRA), 2024.

Hao Xiong, Yangxiao Lu, Nicholas Ruozzi
Neural Information Processing Systems (NeurIPS),
December, 2022.
Paper, Code
Adapting Pre-Trained Vision Models for Novel Instance Detection and Segmentation
Yangxiao Lu, Jishnu Jaykumar P, Yunhui Guo, Nicholas Ruozzi, Yu Xiang.
In arXiv, 2024.
arXiv, Project, Code
RISeg: Robot Interactive Object Segmentation via Body Frame-Invariant Features.
Howard H. Qian, Yangxiao Lu, Kejia Ren, Gaotian Wang, Ninad Khargonkar, Yu Xiang, Kaiyu Hang.
In International Conference on Robotics and Automation (ICRA), 2024.
arXiv, PDF
, Video
SceneReplica: Benchmarking Real-World Robot Manipulation by Creating Reproducible Scenes
Ninad Khargonkar, Sai Haneesh Allu, Yangxiao Lu, Jishnu Jaykumar P, Balakrishnan Prabhakaran, Yu Xiang
In International Conference on Robotics and Automation (ICRA), 2024.
arXiv, Project
Self-Supervised Unseen Object Instance Segmentation via Long-Term Robot Interaction
Yangxiao Lu, Ninad Khargonkar, Zesheng Xu, Charles Averill, Kamalesh Palanisamy, Kaiyu Hang, Yunhui Guo, Nicholas Ruozzi, Yu Xiang
In Robotics: Science and Systems (RSS), 2023.
arXiv, Project
Mean Shift Mask Transformer for Unseen Object Instance Segmentation.
Yangxiao Lu, Yuqiao Chen, Nicholas Ruozzi, Yu Xiang.
In International Conference on Robotics and Automation (ICRA), 2024.
arXiv, Code, Project
Boosting the Performance of Generic Deep Neural Network Frameworks with Log-supermodular CRFs.
Hao Xiong, Yangxiao Lu, Nicholas Ruozzi.
Neural Information Processing Systems (NeurIPS), December 2022.
Paper, Code
Measurement of large, discontinuous displacement from digital images.
Luo, Zhilei, Xu Hu, Linlin Wang, and Yangxiao Lu.
Strain 56, no. 4 (2020): e12349.
Reservoir Recovery Estimation Using Data Analytics and Neural Network Based Analogue Study.
Chen, Yajing, Zhouyuan Zhu, & Yangxiao Lu et al.
In SPE/IATMI Asia Pacific Oil & Gas Conference and Exhibition. Society of Petroleum Engineers, 2019.